Room exploration with Gazebo simulator
This project executes a mission (written in Python) with Gazebo simulator with path generation with lidar.
In order to execute this test, perform the following steps:
-
Install the Aerostack project called "rooms_exploration_gazebo".
-
Change directory to this project:
$ cd $AEROSTACK_STACK/projects/rooms_exploration_gazebo -
Install the lidar components:
$ ./lidar_instalation.sh -
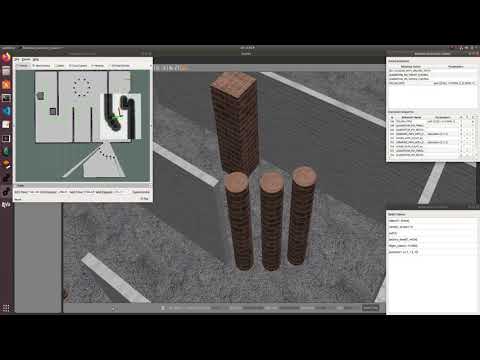
Execute the script that launches Gazebo for this project (the window presented by Gazebo displays a scenario with a set of rooms as it is shown below):
$ ./launcher_gazebo.sh

-
Execute the script that launches the Aerostack components for this project:
$ ./main_launcher.sh -
In order to run the mission you have to execute the following command:
$ rosservice call /drone111/python_based_mission_interpreter_process/start
The following video illustrates how to launch the project:

Here there is a video that shows the correct execution of the mission, with a fixed aerial view and the lidar map:

Here there is a video that shows the correct execution of the mission, with a following view and the lidar map:
Contact: We thank and welcome any suggestion or comment about Aerostack. For any question or bug report you can read and/or write at the issues page. You can also contact the team support at the following address: aerostack.upm@gmail.com
The content of the Aerostack wiki is licensed under Creative Commons license CC BY 4.0